Jaeyoung Lim
Research Statement
Environmental processes such as glacier retreat, avalanche cycles, and ecosystem shifts unfold across vast, inaccessible terrain at scales that exceed what human-operated systems can monitor. Autonomous Mobile robotic systems offer an efficient way to cover vast scale of environments, compared to stationary sensor networks. These systems must be capable of navigating safely through extreme environments while reasoning about the measurements in order to capture the environmental process of interest. However, ensuring safe navigation and targeting measurements are often conflicting objectives, requiring a fine balance between exploitation of known informative regions and exploration of unobserved phenomena.
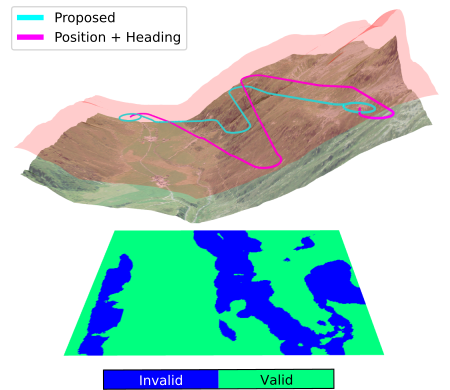
My research addresses this tension by unifying information-theoretic planning with safe, geometric and optimization-based flight control for long-endurance aerial vehicles. I develop informative path planning methods that actively target the most uncertain or informative regions of the environment, coupled with safe navigation and path-following algorithms that allow access to close to the terrain. To further extend the reach of these systems into remote, inaccessible terrain, I work on exploiting wind to extend the endurance of the mission. I validate these appraches not only in simulation but through field deployments in some of the most demanding environments for aerial robotics, including autonomous large-scale snow avalanche monitoring in the Swiss Alps and steep-terrain mapping for alpine infrastructure. Beyond research, I contribute to the open-source PX4 Autopilot project to make these capabilities broadly accessible to the robotics community, while extending toward new domains, including aerial manipulation and space robotics.

Selected Publications