Jaeyoung Lim
Research
Preprints

Journal Publications
2026

Robust Optimization-based Autonomous Dynamic Soaring with a Fixed-Wing UAV
Robotics and Automation Letters (RA-L)
[preprint][paper]
Autonomous and efficient large-scale snow avalanche monitoring with an Unmanned Aerial System (UAS)
Natural Hazards and Earth Science Systems (NHESS)
[paper][dataset]

Towards Open-Source and Modular Space Systems with ATMOS
Transaction Field Robotics (T-FR)
2025

Geometric Tracking Control of Omnidirectional Multirotors for Aggressive Maneuvers
Robotics and Automation Letters (RA-L)
[preprint]
[paper]
[video]

Traversing Mars: Cooperative Informative Path Planning to Efficiently Navigate Unknown Scenes
Robotics and Automation Letters (RA-L)
[preprint]
[paper]
[code]
2024
Conference Papers
2026

DreamFlow: Local Navigation Beyond Observation via Conditional Flow Matching in the Latent Space
International Conference on Robotics and Automation (ICRA) 2026
[project]
2024

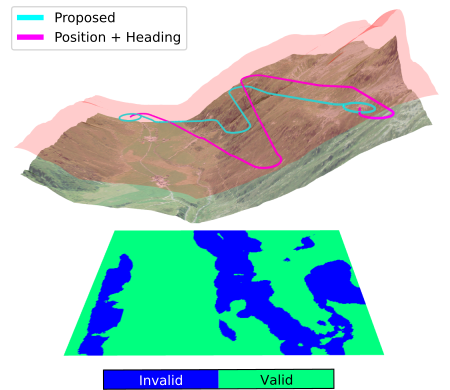
Energy-optimized planning in non-uniform wind fields with fixed-wing aerial vehicles
International Conference on Intelligent Robots and Systems (IROS) 2024

SnowSampler: an Autonomous Uncrewed Aerial Vehicle for Penetration-Based Snow Stratigraphy Measurements on Steep Slopes
International Snow Science Workshop(ISSW) 2024
2023

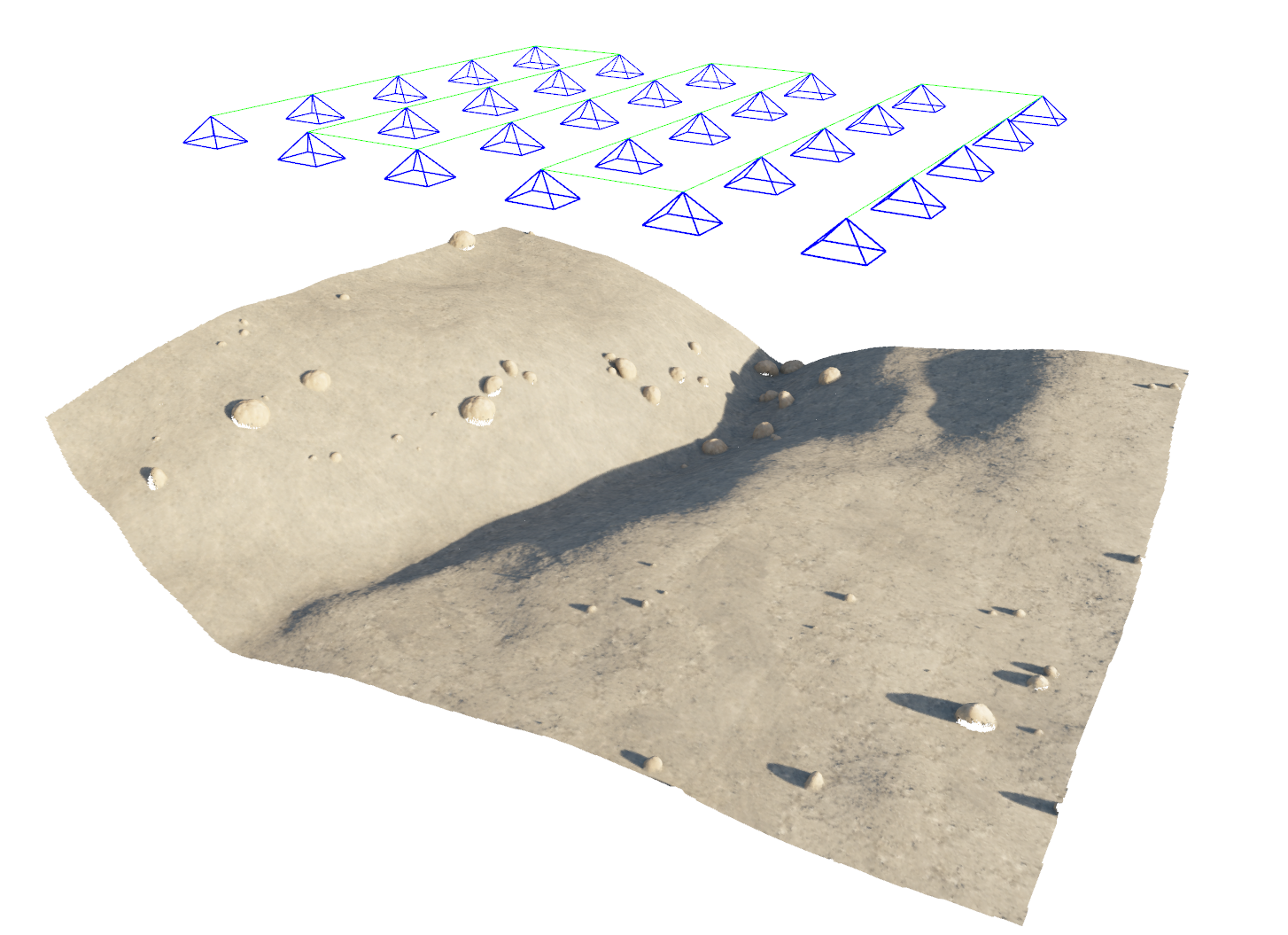
Fisher Information Based Active Planning for Aerial Photogrammetry
International Conference on Robotics and Automation (ICRA) 2023
[paper]
Posters & Workshop Papers
2024

PX4Space: PX4 for Spacecraft and Space Robotics
iSpaRo 2024 Workshop on Exploring the Lunar Frontier Leveraging Robotic Missions

Autonomous Active Mapping in Steep Alpine Environments with Fixed-Wing Aerial Vehicles
ICRA 2024 Workshop on Field Robotics - 🏆Best Workshop Paper Award
2023

Circling Back: Dubins set Classification Revisited
ICRA 2023 Workshop on Energy Efficient Aerial Robotic Systems
2022
Last update: June 12, 2024