Jaeyoung Lim
Code/Data

adaptive-snowsampler is an implementation of the onboard computer system for the SnowSampler drone project.
To learn more about the project, visit: ethz-asl/adaptive-snowsampler
px4-mpc is an implementation of a model predictive controller (MPC) using acados with PX4 and ROS2.
To learn more about the project, visit: Jaeyoung-Lim/px4-mpc
px4-offboard is an implementation of a ROS2 implementation to control PX4 with offboard mode.
To learn more about the project, visit: Jaeyoung-Lim/px4-offboard
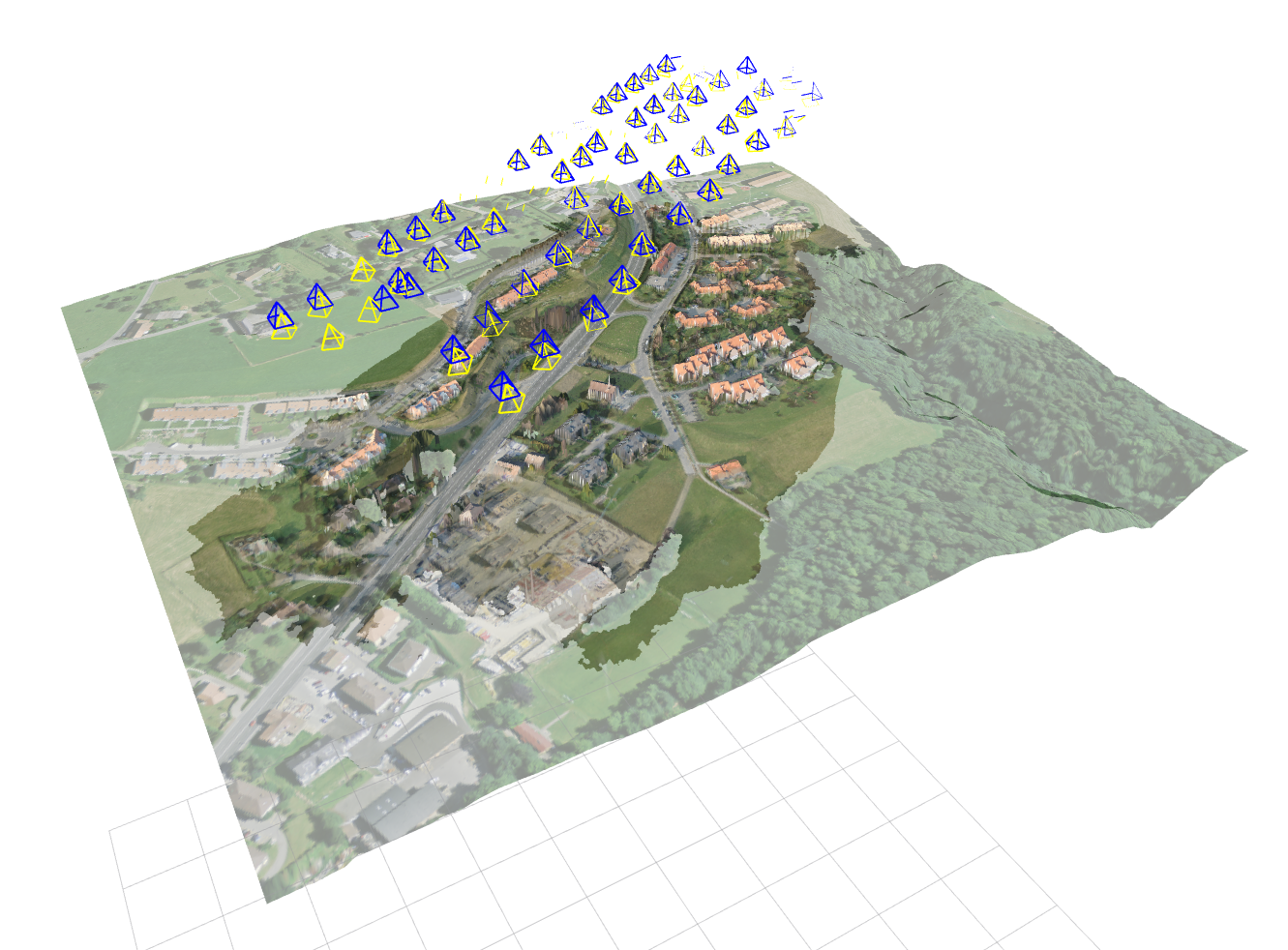
photogrammetry-evaluations is an implementation to evaluate reconstruction quality of multiview stereo pipelines, using COLMAP
To learn more about the project, visit: Jaeyoung-Lim/photogrammetry-evaluations
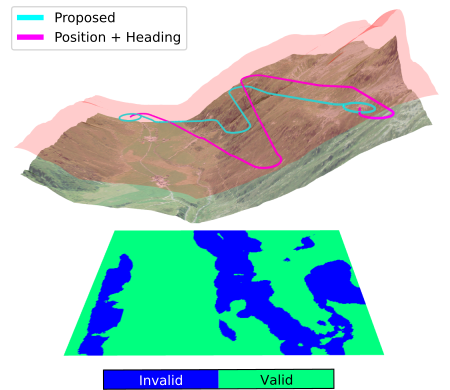
terrain-navigation is an implementation of an autonomous path planner that is readily deployable on a fixed-wing/VTOL vehicle for steep terrain navigation.
To learn more about the project, visit: ethz-asl/terrain-navigation
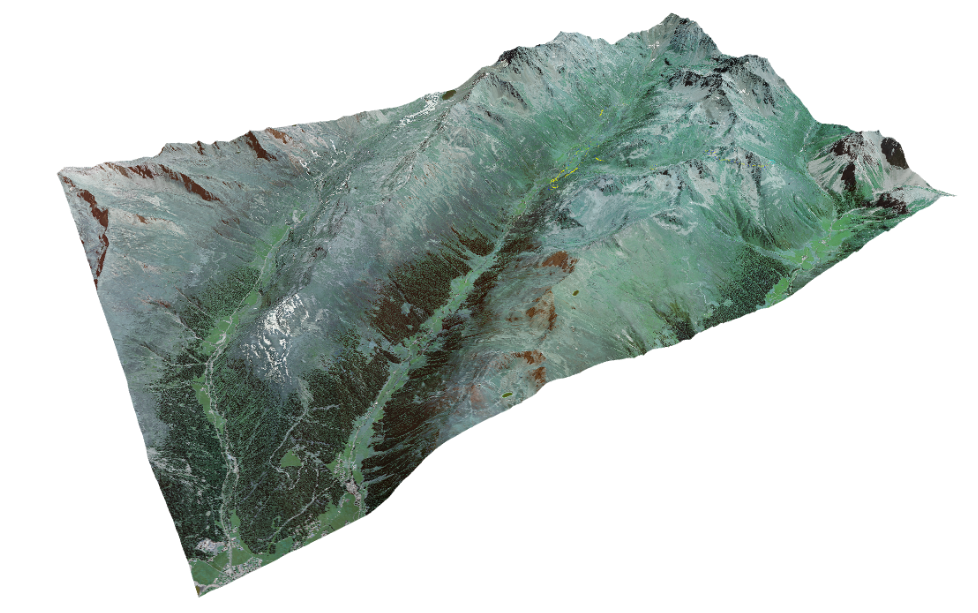
grid_map_geo is a geo referenced elevation map representation that can be used for robots navigating in outdoor / terrain environments.
To learn more about the project, visit: ethz-asl/grid_map_geo
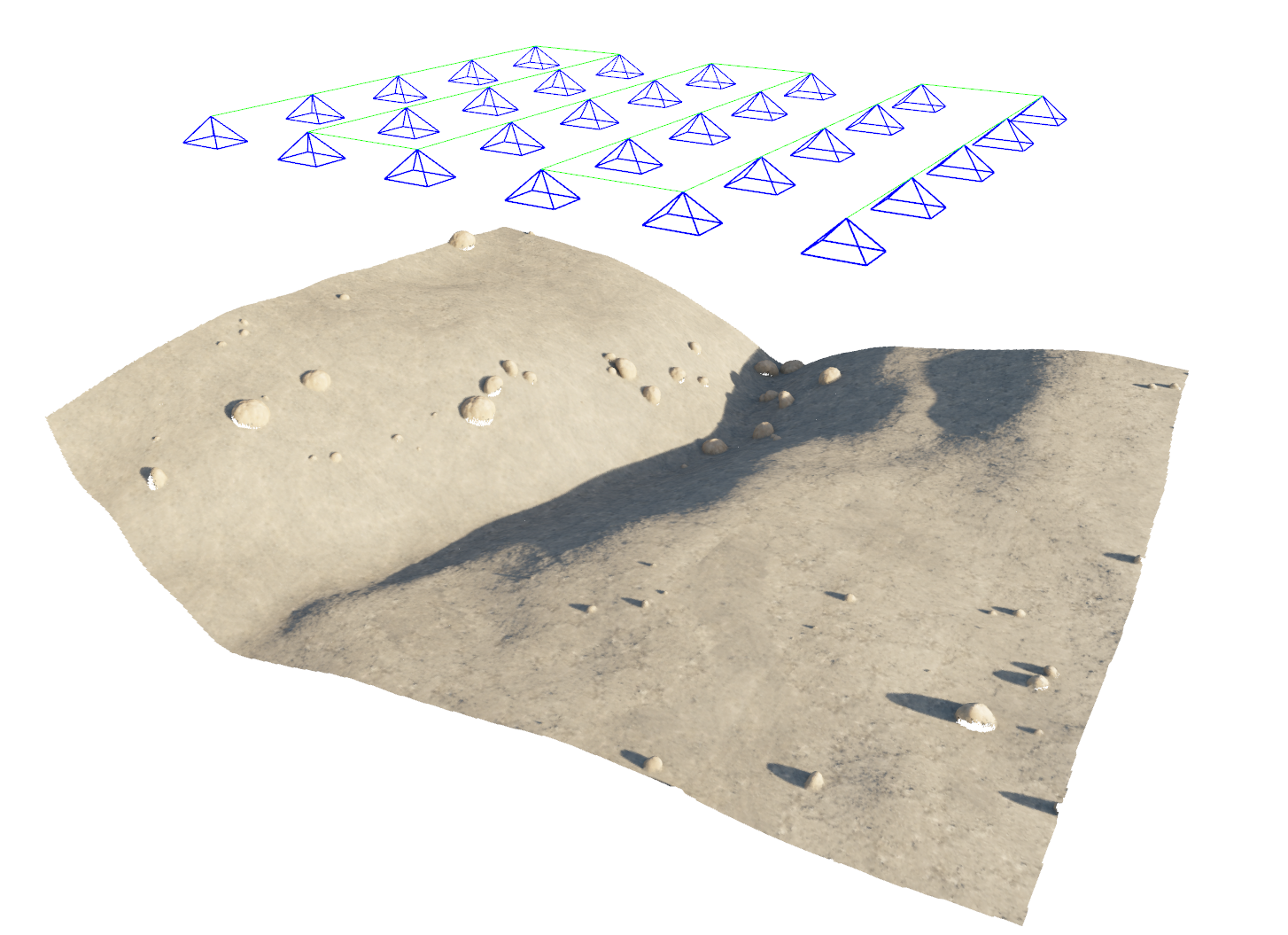
oaisys_active_planning is an implementation into the interactive extension of oaisys to evaluate active perception methods with the photorealistic extra terrestrial simulator OAISYS.
This work was presented at ICRA 2022 Workshop on Releasing Robots into the Wild: Simulations, Benchmarks, and Deploymentsit: [pdf]
px4-jsbsim-bridge is a bridge interface for PX4 Software-In-The-Loop simulation and jsbsim. This allows the PX4 simulation framework to utilize the high fidelity aerodynamic models of the jsbsim.
To learn more about the project, visit: Auterion/px4-jsbsim-bridge

px4-simulation-ignition is a bridge interface for PX4 Software-In-The-Loop simulation and ignition gazebo. This allows the PX4 simulation framework to utilize the ignition gazebo environment.
To learn more about the project, visit: Auterion/px4-simulation-ignition
mavros_controllers is a trajectory tracking controller implemented using mavros for PX4 enabled vehicles. The implementation is based on a nonlinear geometric controller.
To learn more about the project, visit: Jaeyoung-Lim/mavros_controllers